在Python中用遺傳算法優化垃圾收集策略
遺傳算法是一個優化技術,在本質上類似于進化過程。這可能是一個粗略的類比,但如果你瞇著眼睛看,達爾文的自然選擇確實大致上類似于一個優化任務,其目的是制造出完全適合在其環境中繁衍生息的有機體。
在本文中,我將展示如何在Python中實現一個遺傳算法,在幾個小時內“進化”一個收集垃圾的機器人。
背景
我所遇到的遺傳算法原理最好的教程來自Melanie Mitchell寫的一本關于復雜系統的好書《Complexity: A Guided Tour》。
在其中一個章節中,Mitchell介紹了一個名叫Robby的機器人,他在生活中的唯一目的是撿垃圾,并描述了如何使用GA優化Robby的控制策略。下面我將解釋我解決這個問題的方法,并展示如何在Python中實現該算法。有一些很好的包可以用來構造這類算法(比如DEAP),但是在本教程中,我將只使用基本Python、Numpy和TQDM(可選)。
雖然這只是一個玩具的例子,但GAs在許多實際應用中都有使用。作為一個數據科學家,我經常用它們來進行超參數優化和模型選擇。雖然GAs的計算成本很高,但GAs允許我們并行地探索搜索空間的多個區域,并且在計算梯度時是一個很好的選擇。
問題描述
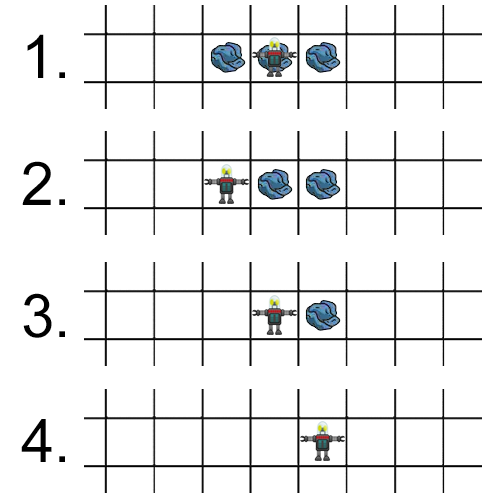
一個名為Robby的機器人生活在一個充滿垃圾的二維網格世界中,周圍有4堵墻(如下圖所示)。這個項目的目標是發展一個最佳的控制策略,使他能夠有效地撿垃圾,而不是撞墻。
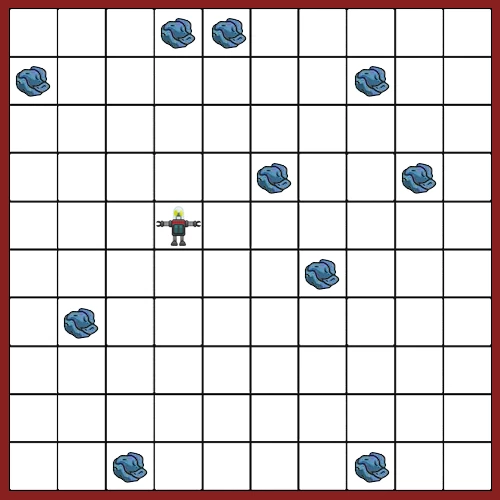
Robby只能看到他周圍上下左右四個方塊以及他所在的方塊,每個方塊有3個選擇,空的,有垃圾,或者是一面墻。因此,Robby有3⁵=243種不同的情況。Robby可以執行7種不同的動作:上下左右的移動(4種)、隨機移動、撿拾垃圾或靜止不動。
因此,Robby的控制策略可以編碼為一個“DNA”字符串,由0到6之間的243位數字組成(對應于Robby在243種可能的情況下應該采取的行動)。
方法
任何GA的優化步驟如下:
- 生成問題初始隨機解的“種群”
- 個體的“擬合度”是根據它解決問題的程度來評估的
- 最合適的解決方案進行“繁殖”并將“遺傳”物質傳遞給下一代的后代
- 重復第2步和第3步,直到我們得到一組優化的解決方案
在我們的任務中,你創建了第一代Robbys初始化為隨機DNA字符串(對應于隨機控制策略)。然后模擬讓這些機器人在隨機分配的網格世界中運行,并觀察它們的性能。
擬合度
機器人的擬合度取決于它在n次移動中撿到多少垃圾,以及它撞到墻上多少次。在我們的例子中,機器人每撿到一塊垃圾就給它10分,每次它撞到墻上就減去5分。然后,這些機器人以它們的擬合度相關的概率進行“交配”(即,撿起大量垃圾的機器人更有可能繁衍后代),新一代機器人誕生了。
交配
有幾種不同的方法可以實現“交配”。在Mitchell的版本中,她將父母的兩條DNA鏈隨機拼接,然后將它們連接在一起,為下一代創造一個孩子。在我的實現中,我從每一個親本中隨機分配每個基因(即,對于243個基因中的每一個,我擲硬幣決定遺傳誰的基因)。
例如使用我的方法,在前10個基因里,父母和孩子可能的基因如下:
- Parent 1: 1440623161
- Parent 2: 2430661132
- Child: 2440621161
突變
我們用這個算法復制的另一個自然選擇的概念是“變異”。雖然一個孩子的絕大多數基因都是從父母那里遺傳下來的,但我也建立了基因突變的小可能性(即隨機分配)。這種突變率使我們能夠探索新的可能。
Python實現
第一步是導入所需的包并為此任務設置參數。我已經選擇了這些參數作為起點,但是它們可以調整,我鼓勵你可以嘗試調整。
- """
- 導入包
- """
- import numpy as np
- from tqdm.notebook import tqdm
- """
- 設置參數
- """
- # 仿真設置
- pop_size = 200 # 每一代機器人的數量
- num_breeders = 100 # 每一代能夠交配的機器人數量
- num_gen = 400 # 總代數
- iter_per_sim = 100 # 每個機器人垃圾收集模擬次數
- moves_per_iter = 200 # 機器人每次模擬可以做的移動數
- # 網格設置
- rubbish_prob = 0.5 # 每個格子中垃圾的概率
- grid_size = 10 # 0網格大小(墻除外)
- # 進化設置
- wall_penalty = -5 # 因撞到墻上而被扣除的擬合點
- no_rub_penalty = -1 # 在空方塊撿垃圾被扣分
- rubbish_score = 10 # 撿垃圾可獲得積分
- mutation_rate = 0.01 # 變異的概率
接下來,我們為網格世界環境定義一個類。我們用標記“o”、“x”和“w”來表示每個單元,分別對應一個空單元、一個帶有垃圾的單元和一個墻。
- class Environment:
- """
- 類,用于表示充滿垃圾的網格環境。每個單元格可以表示為:
- 'o': 空
- 'x': 垃圾
- 'w': 墻
- """
- def __init__(self, p=rubbish_prob, g_size=grid_size):
- self.p = p # 單元格是垃圾的概率
- self.g_size = g_size # 不包括墻
- # 初始化網格并隨機分配垃圾
- self.grid = np.random.choice(['o','x'], size=(self.g_size+2,self.g_size+2), p=(1 - self.p, self.p))
- # 設置外部正方形為墻壁
- self.grid[:,[0,self.g_size+1]] = 'w'
- self.grid[[0,self.g_size+1], :] = 'w'
- def show_grid(self):
- # 以當前狀態打印網格
- print(self.grid)
- def remove_rubbish(self,i,j):
- # 從指定的單元格(i,j)清除垃圾
- if self.grid[i,j] == 'o': # 單元格已經是空
- return False
- else:
- self.grid[i,j] = 'o'
- return True
- def get_pos_string(self,i,j):
- # 返回一個字符串,表示單元格(i,j)中機器人“可見”的單元格
- return self.grid[i-1,j] + self.grid[i,j+1] + self.grid[i+1,j] + self.grid[i,j-1] + self.grid[i,j]
接下來,我們創建一個類來表示我們的機器人。這個類包括執行動作、計算擬合度和從一對父機器人生成新DNA的方法。
- class Robot:
- """
- 用于表示垃圾收集機器人
- """
- def __init__(self, p1_dna=None, p2_dna=None, m_rate=mutation_rate, w_pen=wall_penalty, nr_pen=no_rub_penalty, r_score=rubbish_score):
- self.m_rate = m_rate # 突變率
- self.wall_penalty = w_pen # 因撞到墻上而受罰
- self.no_rub_penalty = nr_pen # 在空方塊撿垃圾的處罰
- self.rubbish_score = r_score # 撿垃圾的獎勵
- self.p1_dna = p1_dna # 父母2的DNA
- self.p2_dna = p2_dna # 父母2的DNA
- # 生成字典來從場景字符串中查找基因索引
- con = ['w','o','x'] # 墻,空,垃圾
- self.situ_dict = dict()
- count = 0
- for up in con:
- for right in con:
- for down in con:
- for left in con:
- for pos in con:
- self.situ_dict[up+right+down+left+pos] = count
- count += 1
- # 初始化DNA
- self.get_dna()
- def get_dna(self):
- # 初始化機器人的dna字符串
- if self.p1_dna is None:
- # 沒有父母的時候隨機生成DNA
- self.dna = ''.join([str(x) for x in np.random.randint(7,size=243)])
- else:
- self.dna = self.mix_dna()
- def mix_dna(self):
- # 從父母的DNA生成機器人的DNA
- mix_dna = ''.join([np.random.choice([self.p1_dna,self.p2_dna])[i] for i in range(243)])
- #添加變異
- for i in range(243):
- if np.random.rand() > 1 - self.m_rate:
- mix_dna = mix_dna[:i] + str(np.random.randint(7)) + mix_dna[i+1:]
- return mix_dna
- def simulate(self, n_iterations, n_moves, debug=False):
- # 仿真垃圾收集
- tot_score = 0
- for it in range(n_iterations):
- self.score = 0 # 擬合度分數
- self.envir = Environment()
- self.i, self.j = np.random.randint(1,self.envir.g_size+1, size=2) # 隨機分配初始位置
- if debug:
- print('before')
- print('start position:',self.i, self.j)
- self.envir.show_grid()
- for move in range(n_moves):
- self.act()
- tot_score += self.score
- if debug:
- print('after')
- print('end position:',self.i, self.j)
- self.envir.show_grid()
- print('score:',self.score)
- return tot_score / n_iterations # n次迭代的平均得分
- def act(self):
- # 根據DNA和機器人位置執行動作
- post_str = self.envir.get_pos_string(self.i, self.j) # 機器人當前位置
- gene_idx = self.situ_dict[post_str] # 當前位置DNA的相關索引
- act_key = self.dna[gene_idx] # 從DNA中讀取行動
- if act_key == '5':
- # 隨機移動
- act_key = np.random.choice(['0','1','2','3'])
- if act_key == '0':
- self.mv_up()
- elif act_key == '1':
- self.mv_right()
- elif act_key == '2':
- self.mv_down()
- elif act_key == '3':
- self.mv_left()
- elif act_key == '6':
- self.pickup()
- def mv_up(self):
- # 向上移動
- if self.i == 1:
- self.score += self.wall_penalty
- else:
- self.i -= 1
- def mv_right(self):
- # 向右移動
- if self.j == self.envir.g_size:
- self.score += self.wall_penalty
- else:
- self.j += 1
- def mv_down(self):
- # 向下移動
- if self.i == self.envir.g_size:
- self.score += self.wall_penalty
- else:
- self.i += 1
- def mv_left(self):
- # 向左移動
- if self.j == 1:
- self.score += self.wall_penalty
- else:
- self.j -= 1
- def pickup(self):
- # 撿垃圾
- success = self.envir.remove_rubbish(self.i, self.j)
- if success:
- # 成功撿到垃圾
- self.score += self.rubbish_score
- else:
- # 當前方塊沒有撿到垃圾
- self.score += self.no_rub_penalty
最后是運行遺傳算法的時候了。在下面的代碼中,我們生成一個初始的機器人種群,讓自然選擇來運行它的過程。我應該提到的是,當然有更快的方法來實現這個算法(例如利用并行化),但是為了本教程的目的,我犧牲了速度來實現清晰。
- # 初始種群
- pop = [Robot() for x in range(pop_size)]
- results = []
- # 執行進化
- for i in tqdm(range(num_gen)):
- scores = np.zeros(pop_size)
- # 遍歷所有機器人
- for idx, rob in enumerate(pop):
- # 運行垃圾收集模擬并計算擬合度
- score = rob.simulate(iter_per_sim, moves_per_iter)
- scores[idx] = score
- results.append([scores.mean(),scores.max()]) # 保存每一代的平均值和最大值
- best_robot = pop[scores.argmax()] # 保存最好的機器人
- # 限制那些能夠交配的機器人的數量
- inds = np.argpartition(scores, -num_breeders)[-num_breeders:] # 基于擬合度得到頂級機器人的索引
- subpop = []
- for idx in inds:
- subpop.append(pop[idx])
- scores = scores[inds]
- # 平方并標準化
- norm_scores = (scores - scores.min()) ** 2
- norm_scores = norm_scores / norm_scores.sum()
- # 創造下一代機器人
- new_pop = []
- for child in range(pop_size):
- # 選擇擬合度優秀的父母
- p1, p2 = np.random.choice(subpop, p=norm_scores, size=2, replace=False)
- new_pop.append(Robot(p1.dna, p2.dna))
- pop = new_pop
雖然最初大多數機器人不撿垃圾,總是撞到墻上,但幾代人之后,我們開始看到一些簡單的策略(例如“如果與垃圾在一起,就撿起來”和“如果挨著墻,就不要移到墻里”)。經過幾百次的反復,我們只剩下一代不可思議的垃圾收集天才!
結果
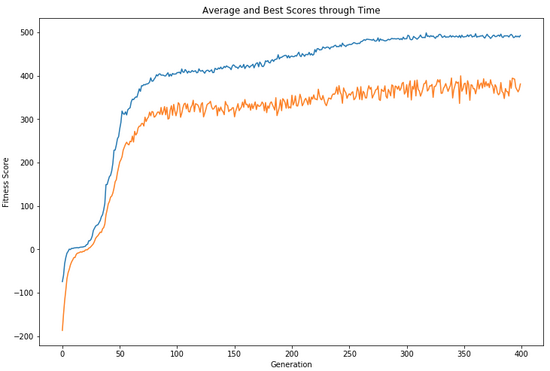
下面的圖表表明,我們能夠在400代機器人種群中“進化”出一種成功的垃圾收集策略。
為了評估進化控制策略的質量,我手動創建了一個基準策略,其中包含一些直觀合理的規則:
- 如果垃圾在當前方塊,撿起來
- 如果在相鄰的方塊上可以看到垃圾,移到那個方塊
- 如果靠近墻,則向相反方向移動
- 否則,隨意移動
平均而言,這一基準策略達到了426.9的擬合度,但我們最終的“進化”機器人的平均擬合度為475.9。
戰略分析
這種優化方法最酷的一點是,你可以找到反直覺的解決方案。機器人不僅能夠學習人類可能設計的合理規則,而且還自發地想出了人類可能永遠不會考慮的策略。一種先進的技術出現了,就是使用“標記物”來克服近視和記憶不足。
例如,如果一個機器人現在在一個有垃圾的方塊上,并且可以看到東西方方塊上的垃圾,那么一個天真的方法就是立即撿起當前方塊上的垃圾,然后移動到那個有垃圾的方塊。這種策略的問題是,一旦機器人移動(比如向西),他就無法記住東邊還有1個垃圾。為了克服這個問題,我們觀察了我們的進化機器人執行以下步驟:
- 向西移動(在當前方塊留下垃圾作為標記)
- 撿起垃圾往東走(它可以看到垃圾作為標記)
- 把垃圾撿起來,搬到東邊去
- 撿起最后一塊垃圾
從這種優化中產生的另一個反直覺策略的例子如下所示。OpenAI使用強化學習(一種更復雜的優化方法)教代理玩捉迷藏。我們看到,這些代理一開始學習“人類”策略,但最終學會了新的解決方案。
結論
遺傳算法以一種獨特的方式將生物學和計算機科學結合在一起,雖然不一定是最快的算法,但在我看來,它們是最美麗的算法之一。