













移植BehaviorTree.CPP到OpenHarmony標準系統之一
作者:離北況歸
本篇將分享兩種移植方式,為 BehaviorTree.CPP 編寫BUILD.gn 進行Rom集成,移植后編譯出來的so和可執行文件打包進入固件的方法,移植相關的文件ohos.build修改為bundle.json,ohos.build不再使用。

1、為BehaviorTree.CPP編寫BUILD.gn進行Rom集成
- Rom集成筆者開發環境:
- wsl2+ubuntu18.04
- OpenHarmony 3.2 release 源碼
- 潤和大禹200開發板
2、修改build/subsystem_config.json,新增子系統behaviortree定義
在源碼/build/subsystem_config.json中增加子系統behaviortree。
"behaviortree": {
"path": "third_party/behaviortree",
"name": "behaviortree"
}3、修改vendor/hihope/rk3568/config.json文件將behaviortree添加至rk3568開發板
{
"subsystem": "behaviortree",
"components": [
{
"component": "behaviortree",
"features": []
}
]
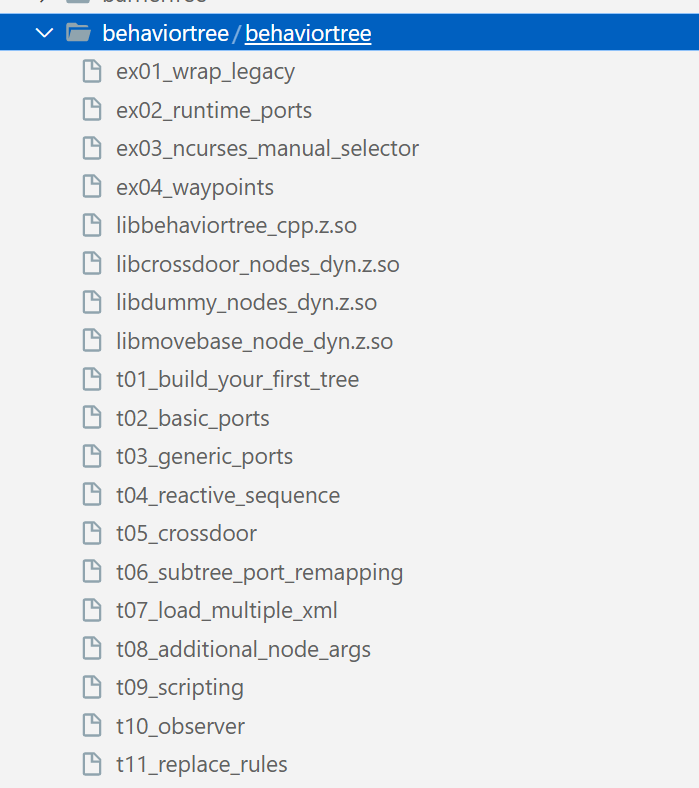
}4、在OpenHarmony標準系統源碼下third_party下放置BehaviorTree.CPP源碼
- BehaviorTree.CPP 源碼版本為4.1.1 :https://github.com/BehaviorTree/BehaviorTree.CPP/tree/4.1.1。
- 并且文件夾名稱修改為behaviortree。
5、third_party/behaviortree目錄下添加bundle.json文件
- 特別說明:ohos.build不再使用,OpenHarmony源碼中全部使用bundle.json。
- bundle.json文件:
{
"name": "@ohos/behaviortree",
"description": "",
"version": "",
"license": "",
"publishAs": "",
"segment": {
"destPath": "third_party/behaviortree"
},
"dirs": {},
"scripts": {},
"readmePath": {
},
"component": {
"name": "behaviortree",
"subsystem": "behaviortree",
"syscap": [],
"features": [],
"adapted_system_type": [],
"rom": "",
"ram": "",
"deps": {
"components": [],
"third_party": []
},
"build": {
"sub_component": [
"http://third_party/behaviortree:lexy_file",
"http://third_party/behaviortree:bt_sample_nodes",
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:dummy_nodes_dyn",
"http://third_party/behaviortree:crossdoor_nodes_dyn",
"http://third_party/behaviortree:movebase_node_dyn",
"http://third_party/behaviortree:t01_build_your_first_tree",
"http://third_party/behaviortree:t02_basic_ports",
"http://third_party/behaviortree:t03_generic_ports",
"http://third_party/behaviortree:t05_crossdoor",
"http://third_party/behaviortree:t04_reactive_sequence",
"http://third_party/behaviortree:t06_subtree_port_remapping",
"http://third_party/behaviortree:t07_load_multiple_xml",
"http://third_party/behaviortree:t08_additional_node_args",
"http://third_party/behaviortree:t09_scripting",
"http://third_party/behaviortree:t10_observer",
"http://third_party/behaviortree:t11_replace_rules",
"http://third_party/behaviortree:ex01_wrap_legacy",
"http://third_party/behaviortree:ex02_runtime_ports",
"http://third_party/behaviortree:ex03_ncurses_manual_selector",
"http://third_party/behaviortree:ex04_waypoints"
],
"inner_kits": [],
"test": []
}
}
}6、BehaviorTree.CPP編譯gn化,在third_party/behaviortree下添加BUILD.gn腳本文件
- third_party/behaviortree/BUILD.gn配置的模塊有
- so
- libbehaviortree_cpp.z.so
- libmovebase_node_dyn.z.so
- libcrossdoor_nodes_dyn.z.so
- libdummy_nodes_dyn.z.so
- .a
- liblexy_file.a
- libbt_sample_nodes.a
- 可執行文件
- t01_build_your_first_tree
- t02_basic_ports
- t03_generic_ports
- t04_reactive_sequence
- t05_crossdoor
- t06_subtree_port_remapping
- t07_load_multiple_xml
- t08_additional_node_args
- t09_scripting
- t10_observer
- t11_replace_rules
- ex01_wrap_legacy
- ex02_runtime_ports
- ex03_ncurses_manual_selector
- ex04_waypoints
- 模塊之間的依賴關系
- libbehaviortree_cpp.z.so依賴lexy_file.a
- libcrossdoor_nodes_dyn.z.so依賴libbehaviortree_cpp.z.so
- libmovebase_node_dyn.z.so依賴libbehaviortree_cpp.z.so
- 所有的可執行文件都依賴libbt_sample_nodes.a和libbehaviortree_cpp.z.so
- third_party/behaviortree/BUILD.gn文件如下:
import("http://build/ohos.gni")
##############################################################################
# 公共配置
config("public_config"){
ldflags = [
#"-lstdc++",
#用-lc++替代-lstdc++
"-lc++",
"-Wl",
"-lm",
"-lc",
"-lpthread",
]
}
##############################################################################
# liblexy_file.a
config("lexy_file_config"){
#cflags_cc是用來存儲專門針對 C++ 語言編譯器的選項,只會被 C++ 編譯器使用。
cflags_cc = [
"-O3",
"-DNDEBUG",
"-Wpedantic",
"-pedantic-errors",
"-Werror",
"-Wall",
"-Wextra",
"-Wconversion",
"-Wsign-conversion",
"-Wno-parentheses",
"-Wno-unused-local-typedefs",
"-Wno-array-bounds",
"-Wno-maybe-uninitialized",
"-Wno-restrict",
"-std=gnu++20",
]
}
ohos_static_library("lexy_file") {
output_name = "lexy_file" # 可選,模塊輸出名
sources = [
"http://third_party/behaviortree/3rdparty/lexy/src/input/file.cpp",
]
defines = [
]
configs = [
":lexy_file_config",
":public_config",
]
include_dirs = [
"3rdparty/lexy/include",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# libbt_sample_nodes.a
config("bt_sample_nodes_config"){
#cflags_cc是用來存儲專門針對 C++ 語言編譯器的選項,只會被 C++ 編譯器使用。
cflags_cc = [
"-O3",
"-DNDEBUG",
"-Wpedantic",
"-std=gnu++17",
# 為了消除編譯報錯添加的
"-fexceptions",
"-frtti",
"-Wno-unused-function",
]
}
ohos_static_library("bt_sample_nodes") {
sources = [
"sample_nodes/crossdoor_nodes.cpp",
"sample_nodes/dummy_nodes.cpp",
"sample_nodes/movebase_node.cpp",
]
defines = [
]
configs = [
":bt_sample_nodes_config",
":public_config",
]
include_dirs = [
"include",
"sample_nodes"
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# libbehaviortree_cpp.so
config("behaviortreecpp_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-fPIC",
"-Wpedantic",
"-Wall",
"-Wextra",
"-std=gnu++20",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
]
include_dirs = [
".",
"include",
"3rdparty",
"3rdparty/lexy/include",
]
}
ohos_shared_library("behaviortree_cpp") {
output_name = "behaviortree_cpp" # 可選,模塊輸出名
sources = [
"src/action_node.cpp",
"src/basic_types.cpp",
"src/behavior_tree.cpp",
"src/blackboard.cpp",
"src/bt_factory.cpp",
"src/decorator_node.cpp",
"src/condition_node.cpp",
"src/control_node.cpp",
"src/shared_library.cpp",
"src/tree_node.cpp",
"src/script_parser.cpp",
"src/json_export.cpp",
"src/xml_parsing.cpp",
"src/actions/test_node.cpp",
"src/decorators/inverter_node.cpp",
"src/decorators/repeat_node.cpp",
"src/decorators/retry_node.cpp",
"src/decorators/subtree_node.cpp",
"src/decorators/delay_node.cpp",
"src/controls/if_then_else_node.cpp",
"src/controls/fallback_node.cpp",
"src/controls/parallel_node.cpp",
"src/controls/reactive_sequence.cpp",
"src/controls/reactive_fallback.cpp",
"src/controls/sequence_node.cpp",
"src/controls/sequence_star_node.cpp",
"src/controls/switch_node.cpp",
"src/controls/while_do_else_node.cpp",
"src/loggers/bt_cout_logger.cpp",
"src/loggers/bt_file_logger.cpp",
"src/loggers/bt_minitrace_logger.cpp",
"src/loggers/bt_observer.cpp",
"3rdparty/tinyxml2/tinyxml2.cpp",
"3rdparty/minitrace/minitrace.cpp",
"src/shared_library_UNIX.cpp",
]
defines = [
"LEXY_HAS_UNICODE_DATABASE=1",
"behaviortree_cpp_EXPORTS",
]
configs = [
":behaviortreecpp_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:lexy_file",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# libdummy_nodes_dyn.so
config("dummy_nodes_dyn_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-fPIC",
"-Wpedantic",
"-std=gnu++17",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
]
include_dirs = [
"include",
"sample_nodes"
]
}
ohos_shared_library("dummy_nodes_dyn") {
output_name = "dummy_nodes_dyn" # 可選,模塊輸出名
sources = [
"sample_nodes/dummy_nodes.cpp",
]
defines = [
"BT_PLUGIN_EXPORT",
"dummy_nodes_dyn_EXPORTS",
]
configs = [
":dummy_nodes_dyn_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# libcrossdoor_nodes_dyn.so
config("crossdoor_nodes_dyn_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-fPIC",
"-Wpedantic",
"-std=gnu++17",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
]
include_dirs = [
"include",
"sample_nodes"
]
}
ohos_shared_library("crossdoor_nodes_dyn") {
output_name = "crossdoor_nodes_dyn" # 可選,模塊輸出名
sources = [
"sample_nodes/crossdoor_nodes.cpp",
]
defines = [
"BT_PLUGIN_EXPORT",
"crossdoor_nodes_dyn_EXPORTS",
]
configs = [
":crossdoor_nodes_dyn_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# libmovebase_node_dyn.so
config("movebase_node_dyn_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-fPIC",
"-Wpedantic",
"-std=gnu++17",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
]
include_dirs = [
"include",
"sample_nodes"
]
}
ohos_shared_library("movebase_node_dyn") {
output_name = "movebase_node_dyn" # 可選,模塊輸出名
sources = [
"sample_nodes/movebase_node.cpp",
]
defines = [
"BT_PLUGIN_EXPORT",
"movebase_node_dyn_EXPORTS",
]
configs = [
":movebase_node_dyn_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t01_build_your_first_tree
config("executable_public_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-Wpedantic",
"-std=gnu++17",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
]
include_dirs = [
"include",
"sample_nodes"
]
}
ohos_executable("t01_build_your_first_tree") {
output_name = "t01_build_your_first_tree" # 可選,模塊輸出名
sources = [
"examples/t01_build_your_first_tree.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t02_basic_ports
ohos_executable("t02_basic_ports") {
output_name = "t02_basic_ports" # 可選,模塊輸出名
sources = [
"examples/t02_basic_ports.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t03_generic_ports
ohos_executable("t03_generic_ports") {
output_name = "t03_generic_ports" # 可選,模塊輸出名
sources = [
"examples/t03_generic_ports.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t04_reactive_sequence
ohos_executable("t04_reactive_sequence") {
output_name = "t04_reactive_sequence" # 可選,模塊輸出名
sources = [
"examples/t04_reactive_sequence.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t05_crossdoor
ohos_executable("t05_crossdoor") {
output_name = "t05_crossdoor" # 可選,模塊輸出名
sources = [
"examples/t05_crossdoor.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t06_subtree_port_remapping
ohos_executable("t06_subtree_port_remapping") {
output_name = "t06_subtree_port_remapping" # 可選,模塊輸出名
sources = [
"examples/t06_subtree_port_remapping.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t07_load_multiple_xml
ohos_executable("t07_load_multiple_xml") {
output_name = "t07_load_multiple_xml" # 可選,模塊輸出名
sources = [
"examples/t07_load_multiple_xml.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t08_additional_node_args
ohos_executable("t08_additional_node_args") {
output_name = "t08_additional_node_args" # 可選,模塊輸出名
sources = [
"examples/t08_additional_node_args.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t09_scripting
ohos_executable("t09_scripting") {
output_name = "t09_scripting" # 可選,模塊輸出名
sources = [
"examples/t09_scripting.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t10_observer
config("t10_observer_config"){
cflags_cc = [
# 為了編譯libbehaviortree_cpp.so原生庫中添加的編譯器標志
"-O3",
"-DNDEBUG",
"-Wpedantic",
"-std=gnu++17",
# 為了消除shared_library.cpp編譯報錯添加-fexceptions
"-fexceptions",
"-frtti",
"-Wno-deprecated-volatile",
"-Wno-unused-lambda-capture",
"-Wno-unused-variable",
]
include_dirs = [
"include",
"sample_nodes"
]
}
ohos_executable("t10_observer") {
output_name = "t10_observer" # 可選,模塊輸出名
sources = [
"examples/t10_observer.cpp",
]
configs = [
":t10_observer_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# t11_replace_rules
ohos_executable("t11_replace_rules") {
output_name = "t11_replace_rules" # 可選,模塊輸出名
sources = [
"examples/t11_replace_rules.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# ex01_wrap_legacy
ohos_executable("ex01_wrap_legacy") {
output_name = "ex01_wrap_legacy" # 可選,模塊輸出名
sources = [
"examples/ex01_wrap_legacy.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# ex02_runtime_ports
ohos_executable("ex02_runtime_ports") {
output_name = "ex02_runtime_ports" # 可選,模塊輸出名
sources = [
"examples/ex02_runtime_ports.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# ex03_ncurses_manual_selector
ohos_executable("ex03_ncurses_manual_selector") {
output_name = "ex03_ncurses_manual_selector" # 可選,模塊輸出名
sources = [
"examples/ex03_ncurses_manual_selector.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################
# ex04_waypoints
ohos_executable("ex04_waypoints") {
output_name = "ex04_waypoints" # 可選,模塊輸出名
sources = [
"examples/ex04_waypoints.cpp",
]
configs = [
":executable_public_config",
":public_config",
]
deps = [
"http://third_party/behaviortree:behaviortree_cpp",
"http://third_party/behaviortree:bt_sample_nodes",
]
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]
part_name = "behaviortree"
subsystem_name = "behaviortree"
}
##############################################################################7、對源碼進行增量編譯,推送編譯生成BehaviorTree.CPP的so以及可執行文件到開發板上,驗證編譯結果
(1)對源碼進行增量編譯
- 推薦使用如下命令對對源碼進行增量編譯,編譯生成BehaviorTree.CPP的so以及可執行文件
./build.sh --product-name rk3568 --ccache --build-target=behaviortree --disable-post-build --disable-package-image --gn-args enable_notice_collection=false --gn-args load_test_config=false- 默認編譯的是32位,添加–target-cpu arm64參數編譯64位
--product-name rk3568 :表示編譯的產品是rk3568 (潤和大禹200)
--build-target=behaviortree :編譯子系統behaviortree
以下這些都是加快編譯速度的選項
--ccache --build-target=behaviortree --disable-post-build --disable-package-image --gn-args enable_notice_collection=false --gn-args load_test_config=false(2)推送編譯生成BehaviorTree.CPP的so以及可執行文件到開發板上,驗證編譯結果
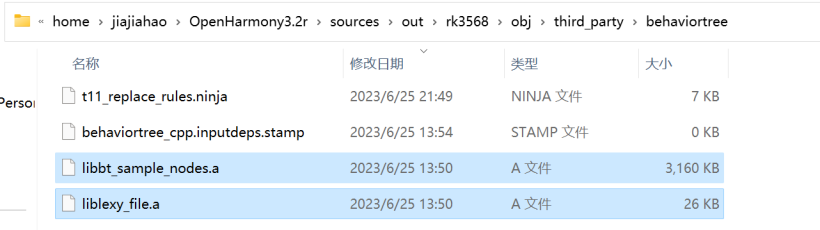
so和可執行文件在out\rk3568\behaviortree目錄下:
liblexy_file.a、libbt_sample_nodes.a等靜態庫文件在out\rk3568\obj\third_party\behaviortree目錄下。
1、通過與ohos版本匹配的hdc_std工具,將編譯生成的庫以及測試用的可執行文件推送到開發板system/lib (lib64)
- 推送到開發板system/lib (lib64),是因為運行需要鏈接該目錄下的libc++.so
- 注意,不再是用hdc_std,改成了hdc
hdc shell
mount -o remount,rw / ## 重新加載系統為可讀寫
chmod 777 t02_basic_ports
./t02_basic_ports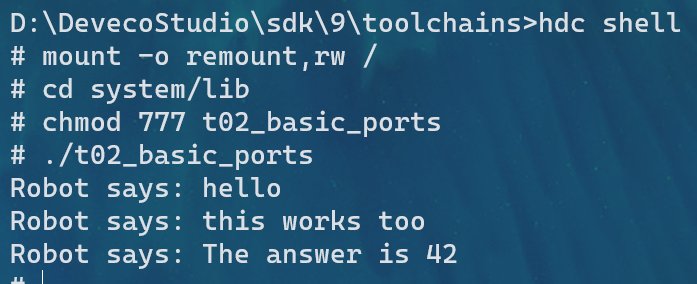
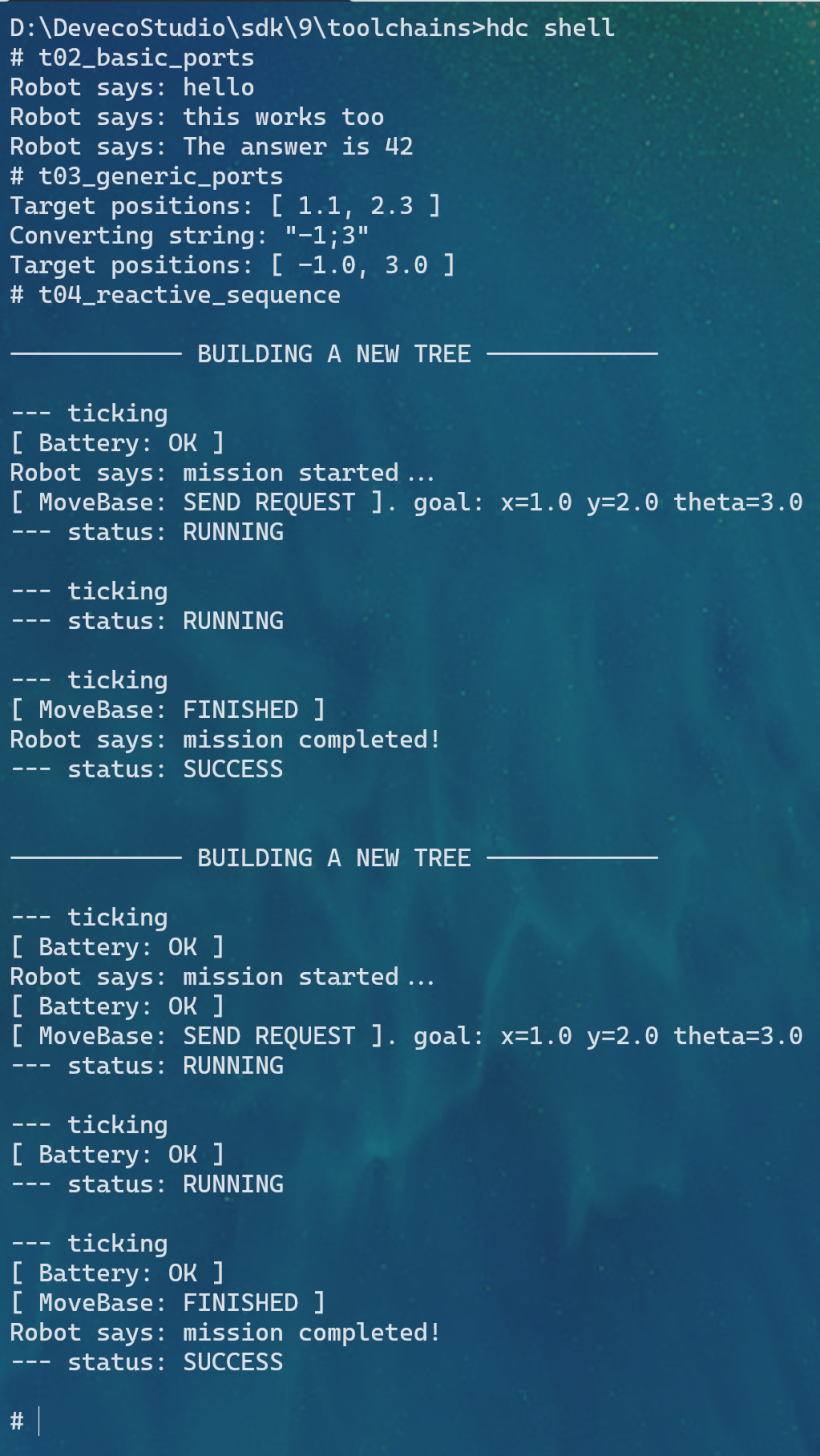
8、對源碼進行增量編譯全量編譯,燒錄固件驗證編譯結果。
- 如果有將編譯生成BehaviorTree.CPP的so以及可執行文件打包到固件,隨固件燒錄到開發板的需求。推薦進行全量編譯,執行 ./build.sh --product-name rk3568 --ccache ,然后編譯燒錄固件到開發板上即可。
- 編譯燒錄好固件到開發板后,so文件會在開發板system/lib(64位系統的話在system/lib64),可執行文件會在system/bin。
- hdc shell進入開發板后,在任意目錄層級下執行可執行文件都可以。
- 將編譯生成BehaviorTree.CPP的so以及可執行文件打包到固件,在上文third_party/behaviortree/BUILD.gn中已經添加相關代碼。
install_enable = true
install_images = [
"system",
"ramdisk",
"updater",
]責任編輯:jianghua
來源:
51CTO 開源基礎軟件社區

























