













可編程的磁驅動軟體機器人來了!Science 子刊:背后原理19世紀末提出
本文轉自雷鋒網,如需轉載請至雷鋒網官網申請授權。
自然界中,鮮花隨風飄動。
實驗室里,科學家們也做出了類似效果。
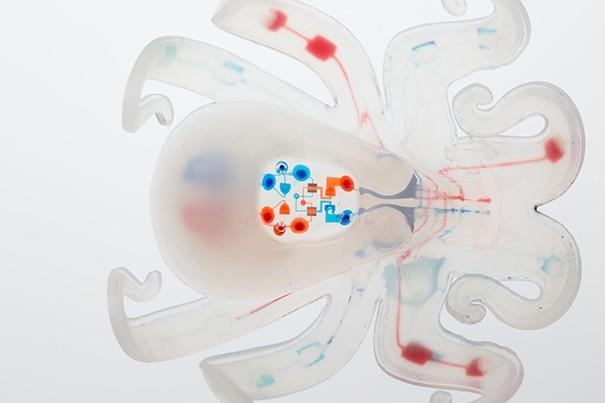
不過,「會動的花瓣」背后的驅動力不是風,而是磁場。按照這一思路,由磁場驅動的可編程軟體機器人也被設計了出來。
這一機器人背后的團隊是一組來自馬克斯 · 普朗克智能系統研究所物理智能部門、卡耐基梅隆大學機械工程系、土耳其科克大學醫學院及工程學院、蘇黎世聯邦理工學院生物醫學工程研究所的研究人員。
2020 年 9 月 18 日,該團隊的研究成果正式發表于頂尖學術期刊《科學》子刊《科學進展》(Science Advances),題為 Reprogrammable shape morphing of magnetic soft machines(磁動力軟體機器人的可編程形變)。
軟體機器人靠什么驅動?
軟體機器人正在進入大眾視野。
香港科技大學機器人研究院院長王煜曾在 2018 世界機器人大會上表示,從最基本的角度來看,軟體機器人主要存在三大問題——如何定義軟體機器人系統、如何設計/控制軟體機器人系統、制造軟體機器人系統的材料問題。
對于第二大問題,王煜教授認為:
我們不可能用鉸鏈和傳感來解決如何從軟體機器人當中產生運動,以及更復雜地怎么控制運動。控制便成了非常麻煩的事情,因為有無窮多的自由度,要看怎么驅動軟體機器人系統,最終怎么做到很好的控制。
也就是說,對于軟體機器人來說,驅動方式是重要一環。
其實,軟體機器人的發展離不開包括材料學、機器人學、生物力學、傳感與控制在內的多學科進步,隨著相關學科近年來的迅速發展,各種不同驅動方式的軟體機器人開始涌現。
比如氣體驅動——機器人與自動化國際會議 ICRA 2017 上,加州大學圣地亞哥分校機器人實驗室公布了一款 3D 打印的軟體四足機器人,這一機器人靠氣體驅動,它的每條腿都由 3 條可伸縮的充氣橡皮管制造而成。

再比如光源驅動——2016 年,波蘭華沙大學物理學院的研究人員設計了一款由液晶彈性體制成的軟體機器人,暴露在可見光下時會發生形變,身體也會相應進行移動。
甚至是自我驅動——還是在 2016 年, 哈佛維斯生物工程研究所制造出了世界上第一個完全軟體的自我驅動機器人,據說可以獨立運行 4-8 分鐘。當時這只「小章魚」還登上了《自然》雜志。
那么,前文所說的受到磁場驅動的軟體機器人有先例嗎?當然有。
同樣是在 2016 年,美國科學家受魚的啟發,研發出一款「納米魚機器人」,其應用場景正是在人體內輸送藥物。這條小魚受磁驅動,游泳的速度和方向由磁場的方向和力量決定。

問題來了:時隔四年,磁驅動軟體機器人系統有了怎樣的革新?
二氧化鉻微粒的高通量磁編程
首先要明確的是,科學家們將這一機器人稱為「由磁場驅動的可編程軟體機器人」,也就是說,這一機器人的突破就在于「可編程」。
科學家們表示,雖然磁驅動軟體機器人已經應用到了微創醫學、可穿戴設備等領域,但機器人內部的磁場分布都是按照預先設定好的模式進行制造的,無法重復編程。
用科學家們的話說就是:
目前的磁編程方法內在地耦合到了順序制造過程,阻止了可重編程和吞吐量編程。
基于此,團隊的策略是熱輔助磁編程。
第一步是,通過激光局部加熱磁性軟材料,直至溫度高于嵌入軟體機器人系統中的二氧化鉻 10 微米大小微粒的居里溫度。
居里溫度也叫居里點(Curie point),19 世紀末由皮埃爾·居里提出。它是指磁性材料中自發磁化強度降到零時的溫度:
-
溫度低于居里點時,物質成為鐵磁體,和材料有關的磁場很難改變;
-
溫度高于居里點時,物質成為順磁體,和材料有關的磁場很容易隨周圍磁場的改變而改變。
所以科學家們第一步要做的就是將嵌入軟體機器人系統中永鐵磁顆粒加熱成為順磁體,其磁場就能受外界影響。
【居里夫人的丈夫皮埃爾·居里】
第二步是,在冷卻過程中施加磁場,重新定向嵌入軟體機器人系統中永鐵磁顆粒的磁疇。
這里需要解釋一下什么是磁疇(Magnetic Domain)。
我們都知道,分子、原子可以構成物質材料的基元(構成生物體的大分子上的局部區域),基元中電子繞著原子核運轉就能形成電流,電流又可以產生磁場。
因此,每個基元都相當于一個很小的磁體,而大量基元就組成一個更大的結構,如果結構中所有基元都會產生同方向的磁場,那么這個結構就叫做磁疇。
按照上述策略,科學家們展示了高空間分辨率(~38 μm)的離散、三維和可重編程磁化。
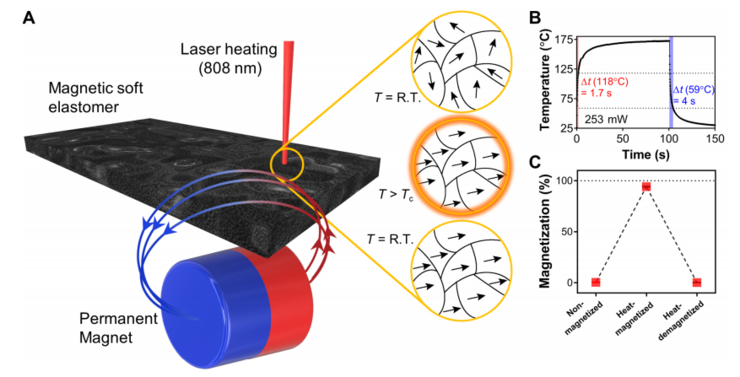
上圖 A 部分正是上述兩步操作的示意圖。
B 部分展示的則是,加熱到二氧化鉻粒子的居里溫度(118℃)用了 1.7s,冷卻到居里溫度的一半用時 4s。C 部分顯示,熱輔助磁化達到 90%。
激發軟體機器人的潛力
那么,這樣的策略成效如何呢?
論文介紹,團隊利用可編程磁化,成功改變了軟體機器人內部的磁場分布。由此,輔助超材料結構的機械行為可得到重構,行走軟體機器人的運動可得到調節,軟夾也能實現自適應抓取。
如下圖所示,一組具有不同三維磁化曲線的結構,在磁場的作用下可以轉換成復雜的三維結構。

另外,研究團隊設計了一個三維磁化的“火柴人”結構。可以看到,不管是它的身體、肩膀、手臂還是頭部,在磁場的驅動下,“火柴人”經歷著復雜的三維形變。
研究團隊也通過磁化設計了一種可重編程的自適應軟夾。

不僅如此,科學家們還利用磁場分布轉移制作出了智慧女神雅典娜的頭像。
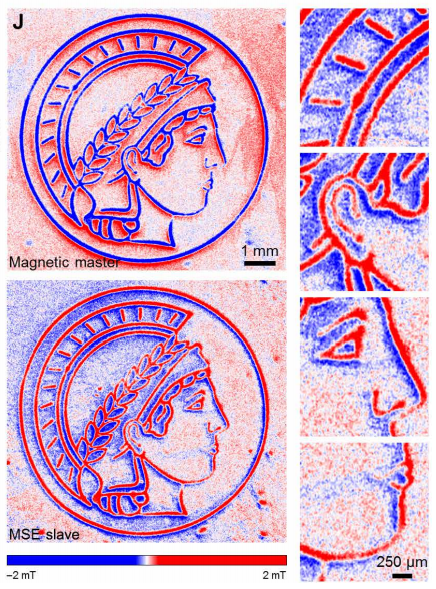
總的來說,這一策略實現了 38 微米級別的高通量磁編程(速度高達 10 個復刻樣品/分鐘),也為開發多尺度、再編程的軟體機器人提供了豐富的設計空間和大規模的制造潛力。
引用來源:
https://advances.sciencemag.org/content/advances/6/38/eabc6414.full.pdf





















