刷新無監督異常檢測上限!首提「匹配代價濾波for異常檢測」范式 | ICML'25
你是否想過,工廠是如何在很多種不同產品中,精準識別出淺淺的劃痕、缺失的元件,甚至是幾乎察覺不到的微小缺陷?這遠比「圖像識別」要復雜。
在工業質檢、安防監控、醫療影像等場景中,無監督異常檢測(Unsupervised Anomaly Detection, UAD)日益成為核心技術之一。
由于現實世界中異常樣本稀少、類型多樣、標注昂貴,UAD 憑借「僅用正常樣本訓練」的能力,在工業界獲得了廣泛關注。
但一個悄然被忽視的難題也在同步放大:當前最先進的檢測模型,無論是基于圖像重建的 Diffusion/UNet/ViT,還是基于特征對比的 DINO/ViT,在生成異常圖(anomaly map)時幾乎都隱含了一個過程:匹配(matching)。
當前許多AI系統依賴于將待測圖像與正常樣本進行匹配來判斷異常,但這一過程極易受到噪聲干擾,尤其在處理模糊、低對比或結構細微的缺陷時,常常出現誤報與漏檢。
而這個看似「簡單」的操作,常常掩蓋了檢測失敗的根源。匹配過程中的噪聲,可能是真正導致誤檢與漏檢的幕后黑手。
在ICML 2025接收論文中,來自東北大學、Meta和英國薩里大學的研究者聯合提出CostFilter-AD,首次將「匹配代價體濾波」系統性引入無監督異常檢測(UAD)。與其說關注「學得更好」,CostFilter-AD更關注「比得更準」。

論文鏈接:https://icml.cc/virtual/2025/poster/46359
GitHub地址:https://github.com/ZHE-SAPI/CostFilter-AD
演示:
https://github.com/ZHE-SAPI/CostFilter-AD/blob/main/Materials/CostFilter-AD_slide_ICML2025.pdf
它構建一個異常代價體來全局表征圖像與正常模板之間的匹配成本,并通過濾波機制清除噪聲、增強邊界,使得微小異常也難以遁形。
更重要的是,CostFilter-AD無需真實缺陷樣本參與訓練,僅依賴正常樣本就能精準檢測各類未知異常,具備強泛化能力與部署適應性。
作為一個通用插件式模塊,它能無縫集成到現有檢測方法中,有效提升檢測精度與邊界清晰度,為工業質檢帶來更智能、更可靠的解決方案。

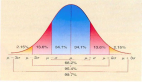
圖1 多類別無監督異常檢測(UAD)結果對比。展示了圖像級與像素級logits的可視化結果及其核密度估計曲線(Parzen,1962)。其中,基線方法的結果以黃色標示,提出的方法以綠色標示。相比之下,該模型在檢測異常時噪聲更少,且在正常與異常logits之間提供了更清晰的區分,表現更加優越。
方法突破口
動機分析:不是模型不夠強,而是「匹配得不夠準」。
目前主流UAD方法大致分為兩類:
- 重建式方法:將輸入圖像還原成「正常版本」,異常區域將表現為高殘差;
- 嵌入式方法:將輸入圖像投影到特征空間,與正常樣本進行相似性匹配。
兩類方法雖然形式不同,但在最后生成anomaly heat map時,本質都要完成一種「輸入vs正常樣本」的匹配。
問題在于:現實中的匹配從不完美。
- 重建式方法中,Diffusion等模型可能會錯誤保留異常結構(e.g. short cut issue),形成「偽正常」圖像;
- 嵌入式方法中,基于預訓練特征(如ViT、DINO)提取的嵌入往往存在尺度、視角、紋理的偏差,使得相似性計算被高維噪聲干擾。
然而,這些「匹配噪聲」長期被忽視,異常檢測系統只能被動接受「殘差」或「相似性」分數,而非從源頭優化其可靠性。
CostFilter-AD:首提「匹配代價體濾波」范式
為解決這一核心難題,研究人員提出一種全新視角:
異常檢測=匹配代價體構建+濾波優化+anomaly map生成,具體步驟為:
- 構建完整的匹配代價體(Cost Volume),顯式表征「輸入圖vs正常樣本」之間的多維匹配關系;
- 引入一個基于雙流注意力(Dual Stream Attention)的3D U-Net網絡,對代價體進行細粒度濾波;
- 輸出結構清晰的anomaly heat map,作為最終異常檢測分割圖。

圖2 CostFilter-AD方法概覽。將無監督異常檢測(UAD)重新表述為一個「匹配代價濾波」過程。(i)首先,利用預訓練編碼器從輸入圖像和模板圖像中提取特征,模板可以是重建得到的正常圖像,或隨機選擇的正常樣本;(ii)接著,基于全局相似性計算構建異常代價體(anomaly cost volume);(iii)然后,設計一個代價體濾波網絡,結合從輸入特征和初始異常圖中提取的注意力查詢信息,對代價體進行細化,生成最終檢測結果;(iv)最后,引入類別感知適配器,以應對類別不平衡問題,并提升模型對多類異常的同時檢測能力。
方法亮點包括:
- 機制創新:首次引入「匹配代價體+濾波」到UAD領域;
- 即插即用:不需改動原模型架構,適配所有主流檢測器;
- 性能顯著提升:Image-AUROC & Pixel-AUROC等七種異常檢測指標全面增長;
- 泛化增強:處理模糊邊界、小尺寸異常亦很有效。
不是再造大模型,而是細化匹配過程
CostFilter-AD包括以下三個關鍵階段:
構建匹配代價體(Matching Cost Volume)
研究人員不再僅僅計算一對圖像之間的單一匹配值,而是:
- 對輸入圖像與多個正常模板圖像進行全局像素級匹配;
- 在每個特征層上計算余弦相似度,得到三維代價體(空間維度 × 匹配維度 × 通道);
- 轉換為 anomaly cost(1?similarity),形成全局異常熱圖。
與常見的最近鄰匹配KNN不同,CostFilter-AD捕獲了多模板、多尺度、多位置之間的結構性匹配模式。
匹配代價體濾波(Cost Volume Filtering)
匹配代價體矩陣雖然得到,但其中依然混有大量「誤判」:正常邊緣誤認為異常(或相反)、異常細節被模糊覆蓋等。
為此,研究人員引入一個具備Dual-Stream Attention機制的3D U-Net網絡,對代價體進行去噪與增強:
- 通道引導(MG):使用初始 anomaly 熱圖引導模型關注更可能為異常的通道區域;
- 空間引導(SG):使用輸入圖特征作為空間注意力,引導模型保留邊界結構;
- 殘差引導機制(RCSA):融合上述注意力流,逐層優化代價體表示。
經過濾波后,輸出anomaly map的分布更集中、邊界更清晰。
類別自適應損失與泛化機制
為適配多類工業檢測任務,研究人員設計了Class-Aware Adapter:
- 利用 soft logit 調整 focal loss 的聚焦因子,自適應平衡易錯類別;
- 優化結構損失(SSIM + soft IoU),增強檢測的結構一致性。
這讓CostFilter-AD在單模型處理多類anomaly時保持高效與準確。
實驗結果
四大數據集、五個最新baseline、七種異常檢測指標全面刷新
CostFilter-AD被集成至五大主流UAD框架中:
- GLAD(Reconstruction-based Diffusion, ECCV’24);
- HVQ-Trans(Reconstruction-based Transformer, NeurIPS’23);
- AnomalDino(Embedding-based Dinov2, WACV’25);
- UniAD(Embedding-based Transformer, NeurIPS’22);
- Dinomaly(Reconstruction-based Transformer, CVPR’25).
研究人員在MVTec-AD、VisA、MPDD、BTAD四個工業數據集上進行像素級和圖像級別異常檢測。
· 定量結果:



更多測試指標請參考論文附錄。
· 可視化結果:邊界更清晰,baseline漏檢區域被成功檢測;

圖3 多類別異常定位的定性對比。研究人員將該方法與GLAD(G)、HVQ-Trans(H)和AnomalDF(A)在MVTec-AD(上三行)和VisA(下三行)數據集上的結果進行對比。通過集成至現有方法中,該方法能夠有效緩解匹配噪聲問題(例如:PCB2中的漏檢、Pill中的誤檢,以及Carpet中的模糊邊界),顯著提升異常檢測性能。
· 內存&推理:平均僅提升顯存和延時較小,有助于實際可部署。

即插即用,輕量部署,工業友好
CostFilter-AD是一款即插即用(plug-and-play)的異常檢測增強模塊:
- 支持多種輸入模板:重建圖、特征模板、混合中間表示;
- 兼容主流模型:ViT-B/8、EfficientNet-B4、DINO、Diffusion全部適配;
- 部署無壓力:可部署于工業邊緣設備、服務器或API服務端。
方法總結:從匹配修正出發,重塑異常檢測核心范式
CostFilter-AD的核心理念在于重塑anomaly map/score的生成方式:
異常檢測的難點,不僅在于是否能還原/嵌入得好,更在于是否「比」得準確。
通過構建代價體并對其進行濾波優化,研究人員重新定義了異常分數的構成邏輯:不是誰更像,而是「匹配結果如何更可信」。
這一思路不僅適用于圖像異常檢測,或許還可遷移至:
- 時序異常檢測(e.g. 預測軌跡vs實際軌跡的匹配代價);
- 視覺異常追蹤(匹配掩碼vs模板結構);
- RL狀態匹配估計(當前狀態vs高獎勵狀態的策略匹配)等場景。