













CVPR2019, 百度Apollo首次曝光L4級自動駕駛純視覺解決方案Apollo Lite
美國當(dāng)?shù)貢r間6月16日-20日,全球計算機視覺及模式識別領(lǐng)域***學(xué)術(shù)會議CVPR 2019(Conference on Computer Vision and Pattern Recognition)于美國長灘召開。百度Apollo在CVPR 2019公開了國內(nèi)唯一的自動駕駛純視覺城市道路閉環(huán)解決方案--百度Apollo Lite。
CVPR作為行業(yè)最***的研究型會議,每年被收錄的論文均來自計算機視覺領(lǐng)域***團(tuán)隊,代表著國際最前沿的科研技術(shù),并指引行業(yè)未來發(fā)展的研究方向。在當(dāng)?shù)貢r間6月17日,百度Apollo在CVPR上舉辦技術(shù)講座,Apollo技術(shù)委員會主席王亮就L4級全自動駕駛(Fully Autonomous Driving)環(huán)境感知技術(shù)方案進(jìn)行了講解,并公開了環(huán)視視覺解決方案百度Apollo Lite。

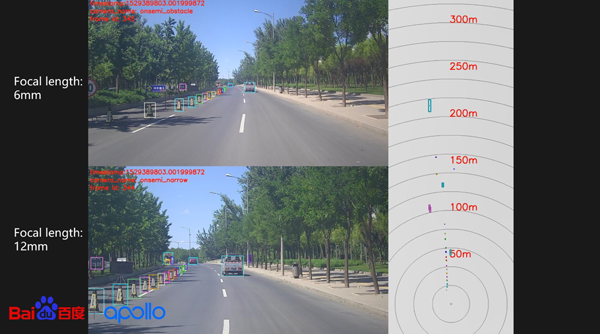
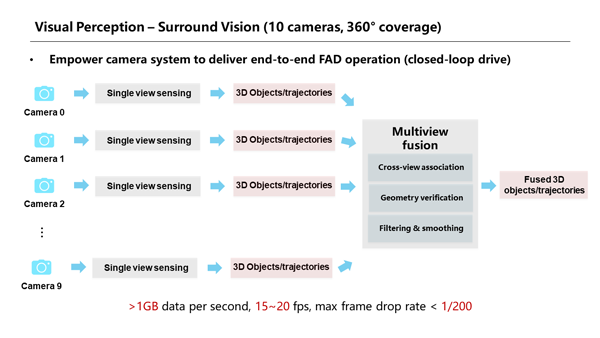
王亮介紹,Apollo Lite是目前國內(nèi)唯一的城市道路L4級視覺感知解決方案,能夠支持對10路攝像頭、200幀/秒數(shù)據(jù)量的并行處理,單視覺鏈路***丟幀率能夠控制在5‰以下,實現(xiàn)全方位360°實時環(huán)境感知,前向障礙物的穩(wěn)定檢測視距達(dá)到240米。王亮表示,經(jīng)過前期的技術(shù)研發(fā)投入和2019年上半年的路測迭代,依靠這套10相機的感知系統(tǒng),百度無人車已經(jīng)可以在城市道路上實現(xiàn)不依賴高線數(shù)旋轉(zhuǎn)式激光雷達(dá)的端到端閉環(huán)自動駕駛。

據(jù)了解,Apollo Lite已經(jīng)在北京稻香湖等多地多路段落地測試。在路測過程中,測試車輛數(shù)目、累計測試?yán)锍毯蛙囕v在城市道路上的閉環(huán)自動駕駛表現(xiàn)優(yōu)異,已達(dá)國際領(lǐng)先水平,可與全球***的ADAS(高級輔助駕駛技術(shù))供應(yīng)商Mobileye提供的純視覺解決方案相媲美。相比旋轉(zhuǎn)式激光雷達(dá)感知方案,視覺感知方案價格低且便于獲得。這套低成本近車規(guī)級環(huán)視感知方案也能夠降級支持ADAS輔助駕駛應(yīng)用,創(chuàng)造更多有價值的應(yīng)用場景,將ADAS產(chǎn)品的能力提升到一個新的高度,為企業(yè)、開發(fā)者們提供了一個低價、優(yōu)質(zhì)的自動駕駛解決方案。
攝像頭是相對成熟的傳感器,除具備輕巧低成本和符合車規(guī)的優(yōu)勢外,高分辨率高幀率(成像頻率)的成像技術(shù)發(fā)展趨勢意味著圖像內(nèi)蘊含的環(huán)境信息更豐富,同時視頻數(shù)據(jù)也和人眼感知的真實世界最為相似,但和三維點云數(shù)據(jù)相比,二維圖像中的信息更難挖掘,需要設(shè)計更強大的算法、大量數(shù)據(jù)的積累和更長期的研發(fā)投入。
王亮表示,百度Apollo始終堅持多傳感器融合的技術(shù)路線。在L4級自動駕駛傳感器選型上,激光雷達(dá)和攝像頭不是排它的的也不是單純的從屬和互補關(guān)系。從安全性考慮,二者具備相同的重要性和不可替代性,缺一不可。
現(xiàn)今很多傳感器融合的方案設(shè)計較為復(fù)雜,技術(shù)人員往往從快速解決問題的角度出發(fā)設(shè)計算法,這個過程中難免避重就輕的利用異構(gòu)數(shù)據(jù)各自的優(yōu)勢進(jìn)行缺陷互補從而繞過困難的問題。基于這種思路設(shè)計的多傳感器融合方案雖然能夠在短期規(guī)避單傳感器方案難以解決的問題,長遠(yuǎn)看,數(shù)據(jù)和策略間深度耦合的設(shè)計不利于為環(huán)境感知系統(tǒng)提供真正意義上的冗余(true redundancy)。傳感器融合意味著多套能夠獨立支撐全自動駕駛的感知系統(tǒng)強強聯(lián)手,獨立工作相互校驗,***概率的保證感知結(jié)果的準(zhǔn)確性和完備性。王亮強調(diào),百度下決心投入資源研發(fā)純視覺感知解決方案并不意味著放棄現(xiàn)有基于激光雷達(dá)的技術(shù)路線,而是在技術(shù)實踐過程中充分意識到無人駕駛系統(tǒng)true redundancy的必要性,決定通過壓強環(huán)視視覺技術(shù)來夯實多傳感器融合感知框架。在傳統(tǒng)激光雷達(dá)為主,視覺為輔的傳統(tǒng)融合策略中,視覺感知自身的問題和缺陷在雷達(dá)感知的掩蓋下暴露不夠充分。今天通過Apollo Lite打磨迭代的純視覺技術(shù)正在持續(xù)反哺百度堅持的多傳感器融合解決方案,提升無人駕駛系統(tǒng)的魯棒性和安全性。
技術(shù)的發(fā)展無疑是自動駕駛產(chǎn)業(yè)的必備要素,而在技術(shù)進(jìn)步的同時,為企業(yè)和開發(fā)者打造低價、易獲取的解決方案,更是推動產(chǎn)業(yè)發(fā)展的重要一環(huán)。可以看出,百度Apollo作為國際領(lǐng)先、中國***的自動駕駛開放平臺,在不斷推進(jìn)自身技術(shù)進(jìn)步的同時,正為自動駕駛的規(guī)模化、量產(chǎn)化提供層出不窮的全新技術(shù)。只有讓優(yōu)質(zhì)技術(shù)在更多人手中得以利用,自動駕駛產(chǎn)業(yè)才能愈發(fā)蓬勃,展現(xiàn)其應(yīng)有的光芒。

















