













機(jī)器人頂會(huì)RSS各獎(jiǎng)項(xiàng)出爐,CMU華人博士生摘得最佳論文
近日,機(jī)器人領(lǐng)域知名會(huì)議 RSS(Robotics: Science and System)公布了今年的最佳論文、最佳學(xué)生論文、杰出審稿人、時(shí)間檢驗(yàn)獎(jiǎng)等重要獎(jiǎng)項(xiàng)。其中,最佳論文獎(jiǎng)和杰出審稿人獎(jiǎng)都由華人學(xué)者摘得。
與其他領(lǐng)域動(dòng)輒接收上千篇論文的頂會(huì)不同,RSS 算是一個(gè)小眾的機(jī)器人會(huì)議,每年接收的論文只有幾十篇,錄取難度比較高。從方向來看,RSS 接收的論文更偏重算法和數(shù)學(xué),今年的建議投稿方向包括機(jī)制設(shè)計(jì)、機(jī)器人學(xué)習(xí)、控制與動(dòng)力學(xué)、人機(jī)交互、機(jī)器感知、多機(jī)器人系統(tǒng)和醫(yī)療保健機(jī)器人等。偏應(yīng)用的機(jī)器人文章可能更適合投 ICRA 和 IROS。
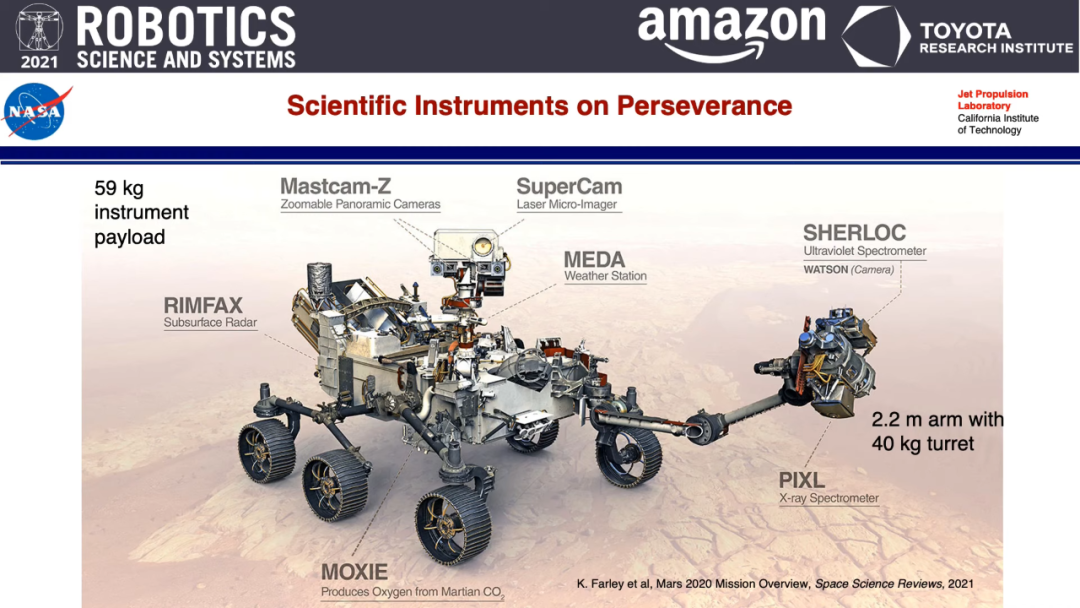
受疫情影響,今年的 RSS 于 7 月 12 日至 16 日在線上舉辦,分為 Keynote、Workshop、Tutorial 等多個(gè)環(huán)節(jié)。在 Keynote 環(huán)節(jié),美國宇航局噴氣推進(jìn)實(shí)驗(yàn)室高級(jí)研究科學(xué)家兼計(jì)算機(jī)視覺小組主管 Larry Matthies 介紹了「毅力號(hào)」火星車在登陸火星之后取得的進(jìn)展。在 Workshop、Tutorial 等環(huán)節(jié),來自多個(gè)研究機(jī)構(gòu)的學(xué)者探討了機(jī)器人視覺學(xué)習(xí)與推理、GPU 加速的機(jī)器人學(xué)習(xí)與控制等話題。相關(guān)視頻可以在 Youtube 等平臺(tái)找到。
如今,備受關(guān)注的最佳論文等獎(jiǎng)項(xiàng)也已出爐,以下是詳細(xì)的獲獎(jiǎng)信息。
最佳論文獎(jiǎng)
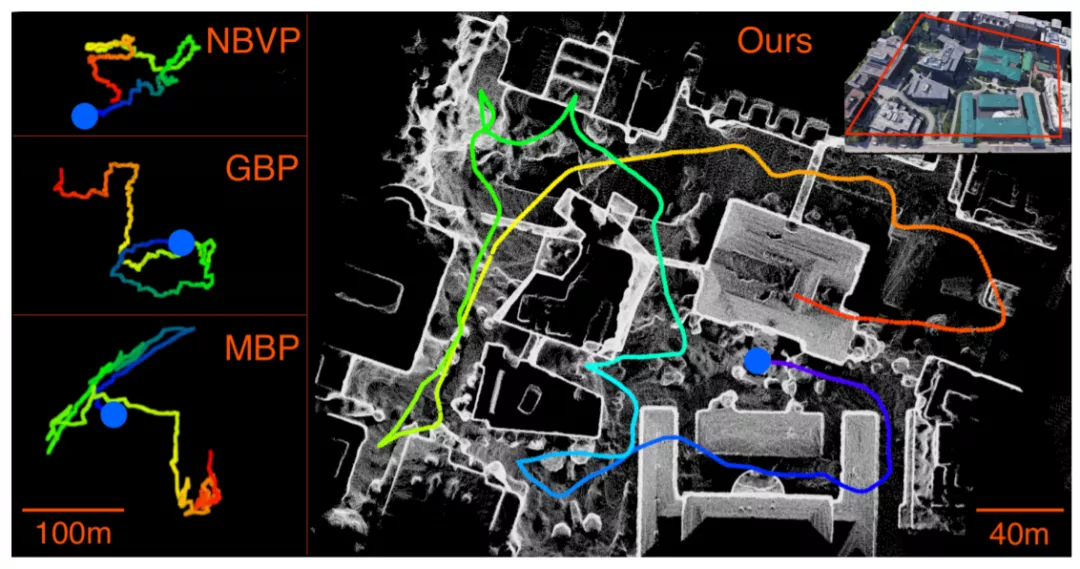
論文:TARE: A Hierarchical Framework for Efficiently Exploring Complex 3D Environments
- 論文主頁:https://roboticsconference.org/program/papers/018/
- 作者:Chao Cao、Hongbiao Zhu、Howie Choset、Ji Zhang
- 機(jī)構(gòu):CMU
讓機(jī)器人在復(fù)雜的 3D 空間中自主探索是一個(gè)頗具挑戰(zhàn)性的問題,因?yàn)樗枰瑫r(shí)完成兩項(xiàng)任務(wù):1)在線更新環(huán)境表示,以跟蹤已探索的區(qū)域;2)搜索連續(xù)可遍歷路徑的表示,以引導(dǎo)機(jī)器人探索未知區(qū)域。
在這篇論文中,研究者提出了一種在復(fù)雜 3D 環(huán)境中自主探索的方法,其探索速度比當(dāng)前的 SOTA 方法還要快。具體來說,該方法使用了一種分層框架:第一層在局部規(guī)劃范圍內(nèi)保持環(huán)境的高分辨率表示并計(jì)算詳細(xì)路徑;第二層在全局范圍內(nèi)保持環(huán)境的低分辨率表示并計(jì)算粗略路徑。
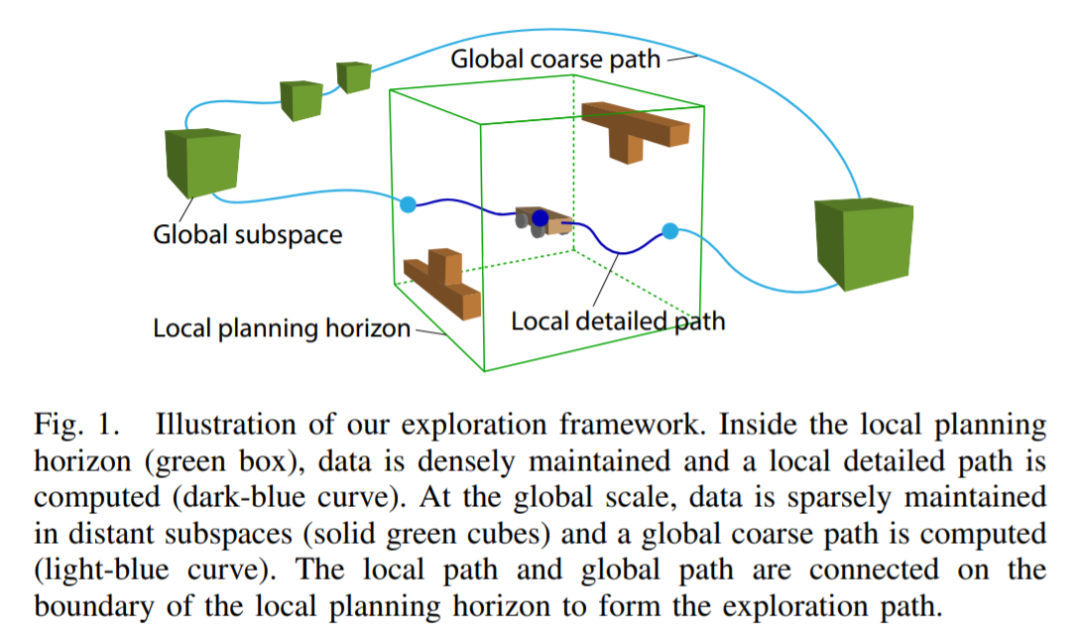
該架構(gòu)表明,在機(jī)器人附近進(jìn)行詳細(xì)的數(shù)據(jù)處理是最高效的,犧牲遠(yuǎn)離機(jī)器人區(qū)域的細(xì)節(jié)計(jì)算可以提高計(jì)算速度。該方法根據(jù)路徑的長度優(yōu)化整個(gè)探索路徑。此外,局部區(qū)域的路徑在運(yùn)動(dòng)動(dòng)力學(xué)上是可行的,機(jī)器人可以遵循該路徑快速前進(jìn)。
在實(shí)驗(yàn)中,該系統(tǒng)通過地面和空中機(jī)器人,自主探索了高維、復(fù)雜的室內(nèi)外環(huán)境。與 SOTA 方法相比,該方法的探索效率(每秒平均探索量)提高了 80%,但消耗的算力還不到 SOTA 方法的 50%。
該論文的第一作者 Chao Cao 本科畢業(yè)于香港大學(xué),目前在卡內(nèi)基梅隆大學(xué)讀博,研究興趣主要集中在機(jī)器人導(dǎo)航和運(yùn)動(dòng)規(guī)劃。除了日常科研之外,他還在領(lǐng)導(dǎo) DARPA 地下城市挑戰(zhàn)賽 Team Explorer 競賽的規(guī)劃工作。
最佳論文入圍
除了最佳論文獎(jiǎng)外,本屆 RSS 會(huì)議還有三篇論文入圍了該獎(jiǎng)項(xiàng),分別如下:
論文 1:Optimal Pose and Shape Estimation for Category-level 3D Object Perception
- 論文主頁:https://roboticsconference.org/program/papers/025/
- 作者:Jingnan Shi、Heng Yang、Luca Carlone
- 機(jī)構(gòu):MIT
本文第一個(gè)貢獻(xiàn)是為姿勢和形狀估計(jì)提供了首個(gè)可證明的最佳求解器;第二個(gè)貢獻(xiàn)是在求解器中添加一個(gè)異常拒絕層(outlier rejection layer),從而使求解器對(duì)大量錯(cuò)誤檢測具有魯棒性;第三個(gè)貢獻(xiàn)是廣泛的實(shí)驗(yàn)評(píng)估,該研究除了在模擬數(shù)據(jù)集和 PASCAL3D + 數(shù)據(jù)集上進(jìn)行消融研究外,還將求解器與深度學(xué)習(xí)關(guān)鍵點(diǎn)檢測器相結(jié)合,并表明所得到的方法比 ApolloScape 駕駛數(shù)據(jù)集中 SOTA 車輛姿態(tài)估計(jì)方法有所改進(jìn)。
論文 2:Moving sidewinding forward: optimizing contact patterns for limbless robots via geometric mechanics
- 論文主頁:https://roboticsconference.org/program/papers/031/
- 作者:Baxi Chong、Tianyu Wang、Bo Lin、Shengkai Li、Howie Choset、Grigoriy Blekherman、Daniel Goldman
- 機(jī)構(gòu):佐治亞理工學(xué)院、CMU
本文中研究者使用幾何運(yùn)動(dòng)規(guī)劃方案,并開發(fā)了一個(gè)框架來設(shè)計(jì)、優(yōu)化和分析接觸模式,以在期望的方向上產(chǎn)生有效的運(yùn)動(dòng)。該研究提出的框架提供了接觸模式設(shè)計(jì)的物理見解,并借鑒了經(jīng)驗(yàn)準(zhǔn)則。應(yīng)用該框架,研究者不僅可以通過接觸模式來控制 12-link 四肢機(jī)器人的運(yùn)動(dòng)方向,而且可以為電機(jī)較少的機(jī)器人(如 6-link 機(jī)器人)設(shè)計(jì)有效的側(cè)繞步態(tài)。實(shí)驗(yàn)表明,該方法通過物理實(shí)驗(yàn)測試獲得了很好的一致性。
論文 3:Toward Certifiable Motion Planning for Medical Steerable Needles
- 論文主頁:https://roboticsconference.org/program/papers/081/
- 作者:Mengyu Fu、Oren Salzman、Ron Alterovitz
- 機(jī)構(gòu):北卡羅來納大學(xué)教堂山分校、以色列理工學(xué)院
本文提出了第一個(gè)用于可操縱引導(dǎo)針的運(yùn)動(dòng)規(guī)劃器。它能夠保證在臨床上適當(dāng)?shù)募僭O(shè)下,在有限的時(shí)間內(nèi)為指定的目標(biāo)計(jì)算出準(zhǔn)確的避障運(yùn)動(dòng)計(jì)劃,或者通知用戶不存在這樣的計(jì)劃 。該研究基于一種新的多分辨率規(guī)劃方法,提出了一種高效、分辨率完備的可操縱針運(yùn)動(dòng)規(guī)劃方法。與 SOTA 可操縱針運(yùn)動(dòng)規(guī)劃器相比,研究表明,新的分辨率完整運(yùn)動(dòng)規(guī)劃器計(jì)算計(jì)劃更快、成功率更高。
最佳學(xué)生論文
本屆 RSS 會(huì)議的最佳學(xué)生論文有兩篇,分別由博世人工智能中心、丹麥技術(shù)大學(xué)等機(jī)構(gòu)和南加州大學(xué)、英偉達(dá)等機(jī)構(gòu)的研究者獲得。
論文 1:Learning Riemannian Manifolds for Geodesic Motion Skills
- 論文主頁:https://roboticsconference.org/program/papers/082/
- 作者:Hadi Beik-mohammadi、Soren Hauberg、Georgios Arvanitidis、Gerhard Neumann、Leonel Rozo
- 機(jī)構(gòu):博世人工智能中心、丹麥技術(shù)大學(xué)、圖賓根大學(xué)、卡爾斯魯厄理工學(xué)院
為了與人類一起工作并在非結(jié)構(gòu)化環(huán)境中執(zhí)行任務(wù),機(jī)器人必須學(xué)習(xí)新的運(yùn)動(dòng)技能并盡快適應(yīng)未見過的環(huán)境。這需要學(xué)習(xí)模型來捕捉相關(guān)的運(yùn)動(dòng)模式,同時(shí)提供足夠的靈活性以使已編碼技能適應(yīng)新的要求,例如動(dòng)態(tài)避障。
該研究引入了黎曼流形來解決這個(gè)問題,并提出從人類示范中學(xué)習(xí)黎曼流形。在人類身上,測地線(geodesics)是自然而然的運(yùn)動(dòng)技能。該研究通過在機(jī)器人末端執(zhí)行器的位置和方向空間上的變分自編碼器(VAE)來實(shí)現(xiàn)這一點(diǎn)。測地線運(yùn)動(dòng)技能可以讓機(jī)器人規(guī)劃數(shù)據(jù)流形上任意點(diǎn)之間的運(yùn)動(dòng)。這種技能還提供了一種簡單的避障方法,即通過在線方式重新定義環(huán)境度量來避開障礙。
此外,測地線利用多解設(shè)置產(chǎn)生的流形來設(shè)計(jì)以前沒有演示過的運(yùn)動(dòng)。該研究使用 7 個(gè)自由度的機(jī)器人機(jī)械手來測試學(xué)習(xí)框架。在此框架下,機(jī)器人能夠很好地學(xué)習(xí)和再現(xiàn)具有復(fù)雜運(yùn)動(dòng)模式的真實(shí)技能、避開以前沒見過的障礙,并在多解設(shè)置中生成新的運(yùn)動(dòng)。
論文 2:DiSECt: A Differentiable Simulation Engine for Autonomous Robotic Cutting
- 論文主頁:https://roboticsconference.org/program/papers/067/
- 作者:Eric Heiden、Miles Macklin、Yashraj S Narang、Dieter Fox、Animesh Garg、Fabio Ramos
- 機(jī)構(gòu):南加州大學(xué)、多倫多大學(xué)、悉尼大學(xué)
在這篇論文中,研究者展示了首個(gè)用于切割軟材料的可微模擬器。該模擬器通過一個(gè)基于有向距離場( SDF)的連續(xù)接觸模型,以及一個(gè)在切割面兩側(cè)插入彈簧并允許它們減弱至零剛度的連續(xù)損傷模型來增強(qiáng)有限元法(FEM),從而形成裂紋。
研究者通過各種實(shí)驗(yàn)對(duì)該模擬器的性能進(jìn)行了評(píng)估,結(jié)果如下:
- 首先可以對(duì)該模擬器進(jìn)行校準(zhǔn)以匹配來自 SOTA 商業(yè)求解器和真實(shí)世界切割數(shù)據(jù)集的合力和形變場,并在切割速度和目標(biāo)實(shí)例上具有普遍性;
- 其次可以利用該模擬器的可微性來高效地執(zhí)行貝葉斯推斷,并在無導(dǎo)數(shù)方法的一部分時(shí)間內(nèi)估計(jì)數(shù)百個(gè)參數(shù)的后驗(yàn);
- 最后可以通過優(yōu)化模擬過程中的控制參數(shù),以通過橫向切片動(dòng)作最小化切割力。
蘋果切片的可視化圖。
時(shí)間檢驗(yàn)獎(jiǎng)
本屆 RSS 會(huì)議的時(shí)間檢驗(yàn)獎(jiǎng)?lì)C給了 2008 年發(fā)表的一篇論文《 SARSOP: Efficient Point-Based POMDP Planning by Approximating Optimally Reachable Belief Spaces 》,論文作者為 Hanna Kurniawati、 David Hsu 和 Wee Sun Lee,他們當(dāng)時(shí)都來自新加坡國立大學(xué)。
論文地址:http://www.roboticsproceedings.org/rss04/p9.pdf
不確定和動(dòng)態(tài)環(huán)境中的運(yùn)動(dòng)規(guī)劃是自主機(jī)器人的基礎(chǔ)能力。POMDPs(partially observable Markov decision processes )算法為解決此類問題提供了一個(gè)標(biāo)準(zhǔn)的數(shù)學(xué)框架,但由于其計(jì)算復(fù)雜度過高而經(jīng)常在機(jī)器人技術(shù)中避免使用。
在本文中,研究者旨在為常見的機(jī)器人任務(wù)創(chuàng)建實(shí)用的 POMDP 算法和軟件,為此他們提出了一種基于點(diǎn)的 POMDP 算法 SARSOP ,該算法利用最佳可達(dá)信念空間的概念來提升計(jì)算效率。在模擬中,研究者成功地將該算法應(yīng)用于一系列常見的機(jī)器人任務(wù),比如沿海導(dǎo)航、抓取、移動(dòng)機(jī)器人探索和目標(biāo)追蹤等,所有這些任務(wù)都被建模為具有大量狀態(tài)的 POMDP。他們發(fā)現(xiàn)在大多數(shù)任務(wù)實(shí)例中,該算法顯著優(yōu)于當(dāng)前最快的基于點(diǎn)的算法之一。
SARSOP 算法。
杰出審稿人獎(jiǎng)
個(gè)人主頁:https://www.khoury.northeastern.edu/people/lawson-wong/
本屆 RSS 會(huì)議的杰出審稿人獎(jiǎng)?lì)C給了美國東北大學(xué) Khoury 計(jì)算機(jī)科學(xué)學(xué)院的助理教授 Lawson Wong。他是該校通用機(jī)器人和人工智能實(shí)驗(yàn)室(GRAIL)的負(fù)責(zé)人,致力于學(xué)習(xí)、表示、估計(jì)和使用自主機(jī)器人發(fā)現(xiàn)可能有用的關(guān)于世界的知識(shí)。他自己感興趣的研究議題是識(shí)別和學(xué)習(xí)可以賦能高效機(jī)器人學(xué)習(xí)和規(guī)劃的中間狀態(tài)表示,從而實(shí)現(xiàn)機(jī)器人泛化。總之,他對(duì)機(jī)器人、機(jī)器學(xué)習(xí)和人工智能等領(lǐng)域的很多課題都感興趣。
2009 年,Lawson Wong 獲得了斯坦福大學(xué)的計(jì)算機(jī)科學(xué)榮譽(yù)學(xué)士和碩士學(xué)位。2016 年,他在麻省理工學(xué)院完成了博士學(xué)位。之后,他擔(dān)任布朗大學(xué)的博士后研究員和高級(jí)研究助理。2018 年,他加入東北大學(xué),任職助理教授。























