













自動駕駛的控制過程還需要解決哪些規控問題

雖然無人駕駛被廣泛為時汽車智能的終極目標,然而,受限于汽車技術各個階段的發展規律、法律與法規、事故責任劃分等約束,駕駛人作為駕駛過程的參與者,甚至駕駛主體在很長一段時間內仍將是事實。深入理解駕駛人駕駛行為和機器智能控制系統之間的交互機制和沖突機理,進而建立人機協同共駕系統,也是智能汽車技術發展過程中亟待解決的關鍵問題。
其中的人機共駕系統是指駕駛人和機器均具有車輛控制權的智能汽車系統。人類智能和機器之間存在很強的互補性,與機器系統的精細化感知、規范化決策、精準化控制相比,人的駕駛行為具有模型、退化、延遲、個性化等特點,且易受心理和生理狀態等因素的影響。而機器對比人而言,學習能力和自適應能力相對較弱,環境理解的綜合處理能力不夠完善,對于未知復雜工況的決策能力較差。因此,人機共駕系統主要功能就是要整合駕駛人和機器的優勢,屏蔽兩者的劣勢,實現人機智能的混合增強,最終達到“1+1>2”的效果,從而提高汽車的安全性、舒適性等性能。
人機共駕系統的分類與原理
根據控制權分配方式的不同,人機共駕系統可以分為切換型和共享型人機共駕兩種模式,在切換型人機共駕系統中,駕駛權被分時賦予駕駛人或機器,在共享型人機共駕系統中,駕駛權按照一定的權重被同時分配給駕駛人和機器。

圖1 兩種人機共駕系統的控制模式
在切換型人機共駕系統中,駕駛權可以在駕駛人和機器之間進行靈活自由的轉移。系統中存在一種判斷機制,根據駕駛人和機器的工作狀態、操縱模式等對兩者的控制輸入進行評價,選擇其中更優的一方接入車輛控制。對于切換型人機共駕系統,控制權切換過程是重點。以駕駛人接管機器為例,切換過程如下圖表示。
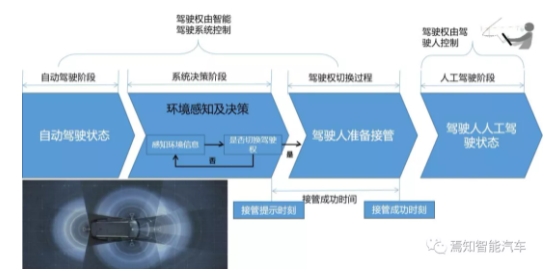
圖2 駕駛員接管切換過程示意圖
該模式的優點包括:駕駛人和機器之間不存在交互和耦合,車輛控制過程明確清晰;駕駛方式改變較小,駕駛人適應性好。而它的缺點主要是在駕駛權切換過程中,難以保證駕駛人具有良好的工作狀態。在機器駕駛過程中,駕駛人注意力可能已經分散,當控制1權被切換到駕駛人是你,需要駕駛人幾種注意力,重新形成對周圍駕駛環境的感知。這一過程存在較大的不確定性,制約了控制權的自由切換。因此,該模式的主要設計難點在于如何評價駕駛人和機器哪一方面的表現更優,并在此基礎上根據駕駛人狀態等因素合理選擇駕駛權切換時機,實現控制權平滑、無憂切換。
在共享型人機共駕系統中,駕駛人和機器同時占有車輛的控制權,兩者通過操縱機構進行交互和耦合,任何一方均可實現實時地控制車輛。雙方共同駕駛過程類似于一場博弈,各方會根據自身的目標和對方的行為形成最優的控制輸入,以期望在控制權共享的情況下最大化的實現自身目標。
進一步分析,按照駕駛人和機器控制結合方式的不同,該模式可以分別為串聯式共享型人機共駕和并聯式共享型人機共駕。串聯式共享型人機共駕系統示意圖,機器不直接對操縱輸入端(踏板、轉向)進行控制。僅對按照一定的比例進行疊加或修正,達到駕駛人和機器時間控制車輛的效果。
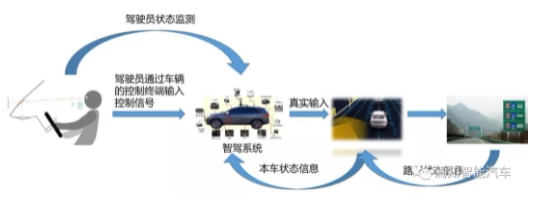
圖3 串聯式共享型人機共駕系統示意圖
并聯式共享型人機共駕系統示意圖如下,駕駛員和加的控制同時直接施加到操縱輸入端,系統通過調節控制權系數K實現人機耦合優化。實際控制輸入可用以下公式表示:
U=UhK+Um(1-K)
K為控制權分配系數,Uh為駕駛人輸入,Um為機器輸入,U為系統實際輸入。
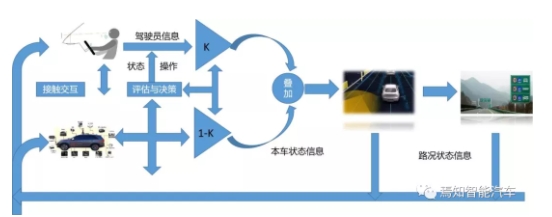
圖4 并聯式共享型人機共駕系統示意圖
如上并聯式共享人機共駕系統優點包括:駕駛人始終參與駕駛過程,可以保證駕駛人狀態的一致性;操縱過程中存在人機交互、便于駕駛人掌握機器狀態,該模式的缺點主要在于駕駛人和機器易于形成沖突,由于雙方可以同時對車輛進行控制,當兩者在對相同的環境判斷產生不同的駕駛意圖時,不同的控制目標將作用于同一個車上,由此將產生較大的沖突。因此,在該模式下需要重點關注的問題為如何預防人機沖突的出現,并在沖突發生后及時消解。
人機共駕系統主要包括自動駕駛系統、駕駛人檢測模塊和人機交互模塊。機器通過分析如上駕駛人相關數據,融合周圍環境和車輛狀態,確定合適的駕駛權切換或駕駛權分配權重。此外,人機交互系統模塊形成了駕駛人和機器的溝通橋梁,使雙方能夠進行有效的表達,提高人機共駕系統的交互性。
線控底盤技術在自動駕駛中的應用
當前自動駕駛系統對于其是安全運行的需求越來越高,這就促使其在功能安全的性能指標上需要提升較大的檔次。比如原來的ACC系統來說,作為一種輔助性駕駛系統,并不要求他具備較高的功能安全,一般情況僅僅達成ASIL A甚至QM就可以了。但是對于下一代產品中的自動駕駛,由于其在駕駛過程中,通常是替代駕駛員執行了大部分駕駛工作,并且在很多駕駛任務中并不能期望駕駛員會為其在一般情況下的失效負責。因此,自動駕駛系統的功能安全明顯比原來的駕駛輔助系統提升了更高的等級。這種等級甚至可以達到ASIL C甚至ASIL D。導致其對執行器的要求越來越高,主要體現在越來越多的控制器會要求在發送響應信號給執行器的同時,執行器會在最快的時間內響應到其發送信號的終極狀態,并且不會出現超調或來回震蕩等,這就是我們所提到響應精度。
當前傳統的底盤控制系統(包含線控制動和線控轉向)在應對整個智能駕駛控制中存在相當大的不足,這里我們列舉如下兩個典型的例子進行說明。
實例1:響應不精確/超調
自動換道在避險回退過程中,常常出現回退過度甚至偏出本車道導致不安全,繼而系統又通過較大的回調力矩將車輛拉回車道中央。在自動駕駛對中或駕駛員控制換道過程中,駕駛員緩慢施加力矩進行方向盤控制時,容易出現系統搶奪方向盤。
實例2:響應延時
在自適應巡航系統ACC中,在進行速度差較大的情況下實現后車跟隨前車行駛過程中,當不間斷的在加速跟車和減速跟車過程中,發送的加減速度也會導致制動系統在執行過程中,出現不斷地在加減速之間進行回調。這個過程會導致制動系統可能出現響應精度不到位或響應超調的狀態。
這些切實存在的問題,嚴重影響自動駕駛控制精度,延長落地的時間。對于自動駕駛而言,需要結合實際存在的問題給出相應的解決方案,不斷協調執行底盤和上層控制器之間的交互問題。
為了更好的實現執行控制,最直觀的體現便是對傳統底盤系統進行更新升級換代,增加用于控制車輛方向的線控底盤技術,而這種改進的線控底盤技術,這無疑會大大促進整個執行控制的響應能力。
對于自動駕駛來說,線控底盤技術由于操縱機構和執行機構沒有機械聯結,也沒有機械能量的傳遞。并且,操縱指令由傳感元件感知,以電信號1形式由網絡傳遞給電子控制器及執行機構。因此,其執行過程和結果完全受電子控制器的監測和控制。并可以在如下幾點上為自動駕駛助力:
1)提供大量的、精確的底盤系統信號。由于底盤傳感器種類繁多,控制器在處理這些傳感器信號時往往需要采用不同的信號模式和處理方法,且需要更高的實時性要求、更好的校驗和解算理論加以支撐。
2)直接給前饋預瞄控制提供精確且逼真的車輛動力學模型。由于底盤車輛及輪胎動力學呈現出復雜的非線性特性,而線控底盤技術可以有效促進研究車輛動力學模型的精確結算機制,有效的促進動力學應用發展。
3)為智能汽車在復雜場景下從駕駛員視角中提供精確的感知狀態。線控底盤技術可以從復雜交通場景中給出車輛運行動力學穩定邊界精確量化機制,提升動力學狀態的精確感知與預瞄技術。在高復雜度、動態交通環境的交互中,為智能駕駛頂層提供相應的助力。
線控轉向設計應用原理
線控轉向系統可以將駕駛員輸入和前輪轉角進行解耦,并特指沒有機械連接的轉向系統,這是從系統的結構上進行的一個區分。在線控轉向中,轉向的動力來源于電機,其主要包括了兩方面:用來給駕駛員提供轉向時的路感及其相應的動力。
線控轉向可以提高整車設計自由度,提高整車舒適度,完全過濾路面顛簸,其轉動效率高、響應時間短。同時,其擁有的可變角/力傳動比特性,還可以提高車輛碰撞安全性和整車主動安全性,整合底盤系統集成,實現系統綜合利用。可以說線控轉向是自動駕駛汽車實現路徑跟蹤與避障避險必要的關鍵技術。
當前,線控轉向系統的研究主要集中在路感反饋控制策略研究、轉向執行控制策略研究以及故障診斷與容錯控制策略研究 3 個方面。其中路感反饋控制策略研究是最主要的一個研究方向。
路感反饋控制策略研究是一個比較抽象的定義,其定義之一是指駕駛員通過方向盤得到的車輛行駛中的轉向阻力矩,該阻力矩主要包含回正力矩和摩擦力矩2部分。

圖5 線控轉向基礎構架圖
其中,回正力矩往往無法實時準確的獲得,作為使車輪恢復到直線行駛位置的主要力矩之一,其數值通常是由經驗、統計或實驗的方法獲得。該值受車輛前輪的受力狀態控制,進而又和車輛實時的運動狀態及路面附著直接相關。因此,路感的計算公式可以表示如下:
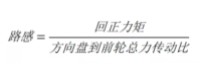
回正力矩與車輛前輪的受力狀態存在直接關系,而前輪受力又和車輛實時的運動狀態及路面附著直接相關。因此,通常把總的回正力矩除以自方向盤到前輪總的力傳動比近似得到的方向盤手力矩看成是路感。
一般對于路感模擬來說,轉向盤反力矩是首要考慮的一個條件,其中轉向反力矩的計算方式如下:
轉向盤反力矩=轉向負載觀測力矩-虛擬助力矩+轉向死點模擬力矩+遇障力矩。路感通常采用基于經驗設計和基于模型設計這2種方法獲得。路感設計為方向盤轉角、車速、橫擺角速度等參數的非線性函數關系式,在不同條件下為駕駛員提供不同的路感,簡單高效,但是自適應性和精度較差。因此,在實際計算路感模擬參數過程中,通常采用基于動力學模型的方法根據車輛的動態響應、駕駛員方向盤輸入等路感相關的輪胎力、摩擦力矩等,最終可以計算出路感。
線控制動應用原理
線控制動是線控底盤技術中難度最關鍵也是難度最高的技術,其關系著底盤安全性和穩定性控制要素。制動性能涉及響應速度、平順性等。
線控制動系統通過將電子信號通過ECU決策后再向4個車輪制動模塊發出制動指令,每個車輪制動模塊上單獨驅動其電機驅動制動摩擦部分實現合理的動力分配和、制動穩定性控控制和有效制動。整個電信號傳輸于踏板信號與執行器之間,再配合ABS、TCS、ESC等模塊實現車輛底盤集成控制。

圖6 線控制動應用原理
當前,線控制動系統的研究主要集中在 3 個方面:踏板模擬、主動制動和制動能量回收。
1)踏板感模擬
線控制動系統是通過模擬器或算法模擬的方式提供給駕駛員相應的踏板力的,這就不再需要踏板和主缸之間的機械連接。線控制動系統的好壞主要取決于踏板力的模擬精確程度。一般的情況是通過提前對大量的時延數據進行分析,可以得出踏板力與踏板行程及車輛狀態之間的關系,并模擬過程是通過彈簧或動作器踏板力進行的。
2)主動制動
主動制動系統主要涉及高級智能駕駛輔助系統ADAS以及自動緊急制動系統AEB的制動功能需求。其要求均是線控制動系統需要準確、快速地響應這個請求。主動制動的響應過程基本都要通過一定的動力學控制算法(包含PID算法、最優控制、魯棒控制、滑膜控制、模糊控制、神經網絡控制、模型預測控制等)進行優化。這些類別中可被大致歸類為基于經驗的設計方法和基于動力學的計算方法。
3)制動能量回收
制動能量回收是指在減速或制動過程中,驅動電機工作于發電狀態,將車輛的部分動能轉化為電能儲存于電池中。同時,施加電機回饋轉矩于驅動軸,對車輛進行制動。在線控制動系統中涉及協調分配電制動力矩和制動力矩,在整個制動能量回收的控制策略研究中基本圍繞這一點展開。
總結
本文從控制執行的角度講解了關于智能汽車在應用過程中規控的基礎理論,其中包含人機共駕技術,線控底盤技術等。這些技術在當前這代智能駕駛輔助產品中應用得還并不成熟。但是,鑒于當前這代產品存在的一系列問題而言,我們下一代自動駕駛系統必須要解決掉這些問題。因此,需要從根源上來分析和屏蔽掉這些問題。本文正是從此動機出發進行了相應的分析和解讀,對于下一代自動駕駛系統的設計提供了有力的參考。





















